Assalamualaikum, Selamat datang bagi para pembaca website ini.
Salah satu sumber kecelakaan di lingkungan rumah tangga adalah kebocoran gas LPG yang tidak langsung terdeteksi. kebocoran gas ini seringkali menjadi sumber kebakaran di rumah-rumah yang menggunakan gas LPG sebagai sumber bahan bakar untuk memasak.
Pada tulisan ini, kita akan mempelajari cara membuat sebuah sistem pemantau kebocoran gas LPG dengan menggunakan Arduino dan sensor gas MQ-2. Untuk output nya kita akan menggunakan speaker piezo buzzer dan LCD 16×2. Alat ini akan bekerja secara terus menerus memantau kondisi udara dan akan langsung mengeluarkan bunyi pertanda adanya kebocoran gas LPG di sekitar alat.
Yuk, langsung saja kita masuk ke menu utama…
Alat dan Bahan
| Nama | Kebutuhan |
|---|---|
| Arduino UNO | 1 Buah |
| Sensor MQ-2 | 1 buah |
| Buzzer | 1 buah |
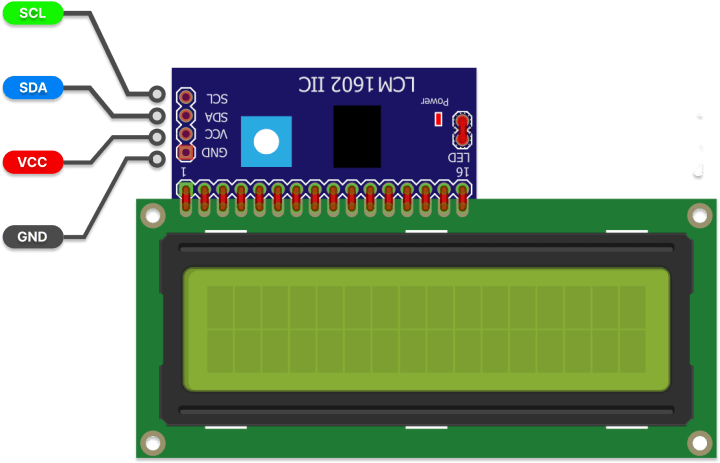
| LCD 16×2 I2C | 1 buah |
| Breadboard | 1 buah |
| Kabel jumper | secukupnya |
Gambar Rangkaian

Instalasi Library LCD 16×2 I2C
untuk bisa mengendalikan sensor LCD 16×2 dengan mudah, kita perlu menginstal library untuk kedua modul tersebut dengan mengikuti langkah-langkah berikut ini:
Bukalah aplikasi Arduino IDE, lalu buka library manager yang terdapat disebelah kiri layar

Library yang akan kita instal adalah library LiquidCrystal_I2C. Gunakan kotak pencarian untuk mempermudah pencarian library yang dimaksud. Lewati langkah ini jika library sudah pernah diinstal sebelumnya.

Setelah library berhasil terinstal, maka kita bisa lanjut ke proses penulisan code program. yukk lanjut…
Coding / Sketch
#define MQ2 8
int nilaiSensor;
#define buzz 9
#include <Wire.h>
#include <LiquidCrystal_I2C.h>
LiquidCrystal_I2C lcd(0x27, 16, 2);
void setup() {
Serial.begin(9600);
Serial.println("Please Wait");
lcd.init();
lcd.backlight();
lcd.setCursor(2, 0);
lcd.print("Please Wait");
lcd.setCursor(0, 1);
for (int a = 16; a >= 0; a--) {
Serial.println(a);
lcd.print(">");
delay(1000);
}
lcd.clear();
Serial.print("Sensor Aktif");
lcd.setCursor(2, 0);
lcd.print("Sensor Aktif");
delay(2000);
lcd.clear();
pinMode(buzz, OUTPUT);
}
void loop() {
nilaiSensor = digitalRead(MQ2);
if (nilaiSensor) {
Serial.println("AMAN");
lcd.setCursor(0, 0);
lcd.print("Status Kebocoran");
lcd.setCursor(0, 1);
lcd.print("-----AMAN-----");
} else {
Serial.println("Ada Kebocoran Gas");
lcd.setCursor(5, 0);
lcd.print("BAHAYA");
lcd.setCursor(0, 1);
lcd.print("!!!Gas BOCOR !!!");
tone(buzz, 1000);
lcd.noBacklight();
delay(500);
lcd.backlight();
noTone(buzz);
}
delay(1000);
lcd.clear();
}
Upload kode diatas, cek dahulu pastikan tidak ada yang error. Setelah upload berhasil, kita bisa langsung uji coba dengan menggunakan gas dari mancis atau dengan menggunakan gas lainnya.
Versi video dari tulisan ini bisa dilihat di channel youtube dibawah ini
Baiklah, sampai disini dulu tulisan ini saya buat, selamat mencoba